turtlebot or turtlebot3.Please use the TurtleBot discourse forum to discuss of interest to large portions of the TurtleBot users community.
Open source hardware is an emerging concept. We’re following the recently established Open Source Hardware Statement of Principles and Definition v1.0. From that document:
"Open source hardware is hardware whose design is made publicly available so that anyone can study, modify, distribute, make, and sell the design or hardware based on that design. The hardware's source, the design from which it is made, is available in the preferred format for making modifications to it....Open source hardware gives people the freedom to control their technology while sharing knowledge and encouraging commerce through the open exchange of designs."
We’re publishing all the information that you need to build your own TurtleBot, including links to all the parts that you need. You’re free (and encouraged) to modify our initial design to create your own variations on TurtleBot.
This site is a resource created by and for the TurtleBot community. It’s a portal for people to learn about TurtleBot, order components to build TurtleBots, and freely exchange information about how to make, modify, and extend TurtleBots.
TurtleBot is about getting hackers involved in robotics. And hackers want maximum control over their hardware and software. Given the plans, parts list, assembly instructions, and links to suppliers, you have the ability to do whatever you want with TurtleBot. You can use components that you already have, substitute similar components, and generally mix and match to order only what you need to build exactly what you want. Of course, any component changes may entail other, as-yet-undocumented modifications to the design. Over time the community will contribute to a common body of documentation on their own TurtleBot variations, at turtlebot.com.
Great! More suppliers of TurtleBot parts means more choice for the TurtleBot community. Please visit this page.
Just as for ROS software, we prefer permissive licenses that facilitate commercial use of code. The preferred license for TurtleBot hardware documentation is the FreeBSD Documentation License.
The Open Source Robotics Foundation holds the TurtleBot trademark with the United States Patent and Trademark Office. If you want to use the TurtleBot name or mark, please send an email to turtlebot@osrfoundation.org.
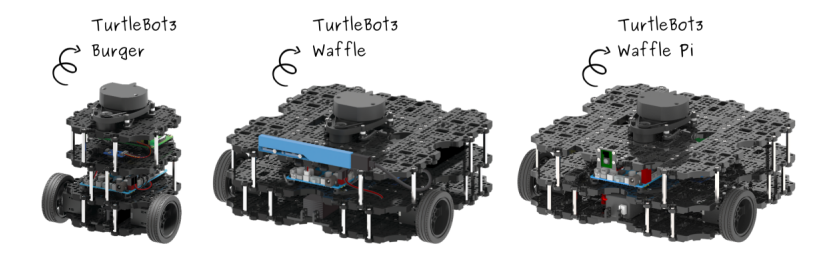
You can assemble and run a TurtleBot3 following the documentation.
MASTERING WITH ROS: TurtleBot3 Within this Course, you are going to learn how you can start working with the TurtleBot3 robot, explore its functionalitities, and how to build build some interesting ROS applications for it. This lecture is made by The Construct
What you will learn via this lecture:
Have a TurtleBot3 simulation running in 5 minutes with RDS v2.0
If you want to learn more ROS, please check the ROBOT IGNITE ACADEMY that contains a series of online ROS tutorials tied to online simulations, giving you the tools and knowledge to understand and create any ROS based robotics development.
Programming with Blockly to run TurtleBot3 (This tutorial is builed by Dabit Industries)
Tutorials for TurtleBot3 simulator in Ubuntu 14.04 (This tutorial is builed by Cyaninfinite)
This book is a ROS robot programming guide based on the experiences we had accumulated from ROS projects like TurtleBot3, OpenCR and OpenManipulator. We tried to make this a comprehensive guide that covers all aspects necessary for a beginner in ROS. Topics such as embedded system, mobile robots, and robot arms programmed with ROS are included. For those who are new to ROS, there are footnotes throughout the book providing more information on the web. Through this book, we hope that more people will be aware of and participate in bringing forward the ever-accelerating collective knowledge of Robotics Engineering.
College students and graduate students who want to learn robot programming based on ROS (Robot Operating system) and also for professional researchers and engineers who work on robot development or software programming. We have tried to offer detailed information we learned while working on TurtleBot3 and OpenManipulator. We hope this book will be the complete handbook for beginners in ROS and more people will contribute to the ever-growing community of open robotics.
From the basic concept to practical robot application programming!

The complete TurtleBot 2 includes a Kobuki base, Microsoft XBOX Kinect, ROS compatible netbook, and factory calibrated gyro.
You can build a TurtleBot from scratch by purchasing the parts such as netbook, Kinect, and Kobuki separately and following the documentation.
Download TurtleBot Documentation
There are several kits avaliable to create a Turtlebot. Check out the distributors’ website to find out more.
The TurtleBot 2e is a new revision of the TurtleBot primarily defined by replacing the netbook with a single board computer such as the 96 Boards CE computer, the DB410c.
Documentation of the TurtleBot2e can be found on github at turtlebot/turtlebot2e and you can get it in pdf format here.
Dabit Industries is offering the TurtleBot2e and the TurtleBot2e Accessory Kit.
Challenge in Simulation
Do you have an iRobot Create that you would like to turn into a TurtleBot? Check out the TurtleBot 1 documentation.